详细介绍
平台特点:
1.支持RCP快速原型设计:实现用户的MATLAB/Simulink仿真模型到嵌入式控制原型的自动转换;
2.平台应用:基于本平台,用户可进行伺服驱动调制方法研究(PWM和SVPWM、矢量控制等电机驱动算法)、控制算法研究(PID、电流、速度闭环PID控制、滑模变结构控制、模糊PID控制);
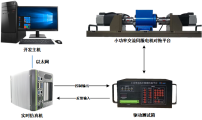
3.硬件资源:平台集成了实时仿真机(控制原型)、功率驱动模块、伺服电机对拖平台;
4.DSP自动代码生成:支持Simulink模型转C语言源码的DSP代码自动生成功能;
5.安全性:平台集成了过压、过流等硬件保护功能,以及PWM死区时间设置错误等软件保护功能,确保用户设备安全;
6.动态加载: 可以实现对拖,施加可变负载,研究高级控制算法在可变负载下的伺服性能;
7.开放性:软硬件底层全部开源,方便二次开发。
实验内容:
1、基础实验:
❉ 电机控制接口实验 ❉ SPWM控制实验 ❉ 电流开环控制实验 ❉ 相电流坐标变换实验 ❉ 转速计算实验
2、综合实验:
❉ 伺服电机的电流环控制实验 ❉ 伺服电机的速度环控制实验 ❉ 伺服电机的位置环控制实验
❉ 伺服电机加载控制实验 ❉ DSP的自动代码生成实验;
3、高阶实验:
❉ 滑膜变结构控制实验 ❉ 无速度传感器控制实验 ❉ 模糊PID控制实验 ❉ 自抗扰控制实验。
选型配置:
|
产品名称 |
产品型号 |
系统配置 |
|
|
低功率交流永磁同步电机控制实验平台 |
LINKS-ES-PMSM-01 |
实时仿真机 |
Links-Box-02 |
|
多功能采集卡 |
Links-IPC-DAQ-04 |
||
|
同步电机对拖平台 |
Links-PMSM-01(400W) |
||
|
电机驱动箱 |
Links-PMSM-Drive Box |
||
|
实时仿真软件包 |
Links-RT |
||