
产品中心Product
联合世界先进制造网络,创造中国先进之光

近些年随着人力成本的攀升,人口的老龄化,制造业从劳动密集型向自动化智能化的升级,社会发展从IT时代正逐步发展到RT(Robotic Technology)时代,移动机器人、机械臂、机器视觉为代表的机器人技术是下一个十年重要的技术,高校科研的热点,经济发展的重要增长点。该平台是针对高校机器人、机电一体化、自动化等本科教学、高校、研究所和企业的科研,推出移动机械臂视觉抓取平台,提供从底层电机的选型、驱动的设计,移动机器人导航,机械臂的运动学和动力学研究,机器视觉的开发和场景的应用,以上技术都开源,导航和机械臂的控制都支持在广大科研人员熟悉的Simulink中进行开发,也支持在该平台上进行深度学习、装配等人工智能的应用研究。可以很好支撑机器人工程专业、机器人、人工智能等方向的科学研究,是一款同时满足应用教学、科研应用的载体。

本产品采用驱控一体化底盘平台配合导航系统,外扩设备,构成智能移动应用实验平台。车体系统由平台控制系统、数据采集系统、视觉采集系统组成。采用开源的ROS系统配合开源SLAM算法,完成室内或室外建图、定位、自动避障、路径规划。平台控制系统作为整车的大脑,通过数据采集系统将外部传感器的数据采集到平台控制系统上,移动控制模块控制轮毂伺服电机,电源管理模块控制整车的电源部分,外部扩展模块控制车体的灯光组件和显示组件,平台控制系统采用高性能TX2作为主机,预留多种传感器接口,开源接口协议,方便各类院校,企业从事科研和产品的二次开发;客户仅需根据自身设计需求,添加相关传感器及其他外扩设备,即可开发出具有自主定位导航功能,满足设计场景的智能应用机器人。

多场景工业机器人应用工作站系统是由六自由度工业机器人系统、PLC控制系统、定点搬运码垛模块、轨迹模拟绘画模块、工业机器人RFID装配分拣模块、工业机器人模拟压铸模块、模拟焊接打磨模块、基础皮带线上料码垛模块、视觉检测上料码垛单元、对射光幕装置、多功能夹具单元、气源控制单元、铝型材框架、触摸屏电控单元、模块存放柜及设备资源包及软件系统组成。

功率级电机性能测试实验平台是能实现采用扭矩传感器测量电机的性能、两个电机互为负载的电机驱动和控制算法开源的实验平台。该平台是基于TI TMS320F28335 DSP和MATLAB/Simulin的图形化编程,结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能。该平台能自动生成DSP代码,拥有上位机监控界面,能在线调节控制参数和保存采集的数据,底层代码开源,是以新能源、电力拖动和电动车辆工程应用为背景的一个开放式产品平台。不仅能用于构建机器人、各种电机、汽车电子、电力电子、机械装备等的电机驱动器快速控制原型开发系统,而且能用于电机性能测试、高级电机控制算法研究的平台。

轮毂电机综合性能测试分析实验平台由带编码器和霍尔传感器的轮毂伺服电机、力矩传感器、磁粉制动器、伺服驱动器、上位机软件组成,系统是基于MATLAB/Simulink进行开发,能实现自动代码生成,实现电机的电流和速度双闭环的实时控制,拥有上位机监控界面,能在线调节控制参数和保存采集的数据。平台可以进行FOC磁场定向控制,SVPWM三相电流和逆变控制、电流、速度PID双闭环等算法的研究,也可以对电机的机械特性、电气特性进行测量和分析的综合的平台。代码开源,支持二次开发,既可以作为《电机拖动与控制》、《自动控制原理》、《现代控制理论》等课程配套实验平台,也可以作为教师科研平台,进行电机驱动、动力学控制等电机高级控制算法的研究。

开源电力电子实验系统是一套模块化的实验套件。该套件由上位机监控部分和下位机硬件部分组成,其中上位机监控部分基于Qt 5.8 开发而成;下位机硬件部分由基于TMS320F28027 DSP的主控制板、功率主电路、信号处理电路和辅助电源模块构成。通过PC可以实现上位机对实验进行控制与显示。通过系统的搭建和学习,可以完成电力电子基本实验内容,可以作为《电力电子技术》等教材的实验平台。
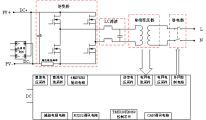
通常把将交流电能变换成直流电能的过程称为整流,把完成整流功能的电路称为整流电路,把实现整流过程的装置称为整流设备或整流器。与之相对应,把将直流电能变换成交流电能的过程称为逆变,把完成逆变功能的电路称为逆变电路,把实现逆变过程的装置称为逆变器。根据逆变器在发电系统中的用途可分为离网逆变器和并网逆变器两种;本产品为并网逆变器。对于并网系统的逆变器,根据有无变压器可分为变压器型逆变器和无变压器型逆变器;本产品为变压器型并网逆变器。

开源多电机平台是基于TMS320F28335 DSP和MATLAB/Simulink开发。其由三组电机对拖平台(含高性能扭矩传感器)、电机驱动控制平台、上位机和软件包组成。三组电机包括1套直流有刷电机(汽车电动门窗、座椅、小型自动化设备等广泛应用)、4套交流伺服电机(机器人、自动化设备等广泛应用)和1套交流异步电机(特斯拉电动汽车广泛应用);电机驱动控制平台软硬件底层全部开源;软件包提供电机驱动控制的全部开发程序。
系统提供电机控制仿真、信号采集、SVPWM产生、坐标变换和FOC磁场定向控制、恒压频比调速、PID电流、速度双闭环控制等内容。可支撑自动化专业、电气工程及其自动化专业、机械设计制造及自动化专业、机器人工程专业、智能科学与技术专业、人工智能工程专业中《电机学》、《电机拖动与控制》、《伺服电机与驱动技术》等课程的配套实验实践平台,同时可支撑科研工作者开发新型的电机控制模型和算法的科研平台。