
产品中心Product
联合世界先进制造网络,创造中国先进之光

Robot动作捕捉系统是一种被动式光学动作捕捉系统,采用多目立体视觉测量原理,由多部近红外高感度摄像机同步实时采集粘贴于运动物体关键部位的高亮反光标记球的动态图像,实时重建标记球的三维空间运动轨迹,并重现物体的运动状态,进行高精度的运动捕捉。系统可以精确拟合物体运动,形成逼真自然的骨骼动画,对物体及其运动状态进行定量分析和全方位六自由度的精确测量。

RobotScan E0505天远创新机器人智能三维检测系统,成功将“一键式扫描”、“全尺寸检测”、“避免人为误差”、“人机协作”等优势完美融合。配合高清成像(扫描精度高达0.015mm)以及极速扫描(单幅扫描时间≤1.5秒)的产品性能优势,确保将高质量的数据完美呈现给每一位用户。

光学跟踪仪能够实时跟踪定位扫描头的空间位置。扫描时无需贴点,让操作人员节省了大量时间,将扫描大中型样件,获取计量级别精度的三维数据过程变得轻松简单。它适用于各类静态和动态应用场景,主要包括航空航天、汽车、造船、能源等行业的大场景三维检测需求
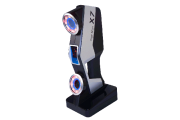
FreeScan X7激光手持三维扫描仪在技术上采用了多线结构光激光器以及先进的双7线扫描技术,ClassⅡ(人眼安全),高速扫描可达480,000次/秒,精度高达0.03mm,可满足多种扫描需求,不受物体大小、材质、颜色等影响
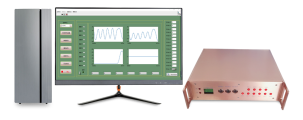
cSPACE控制与仿真系统是基于TMS320F28335 DSP和MATLAB/Simulink开发,拥有AD、DA、IO、Encoder、PWM、CAN、SPI等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是基于模型设计(MBD:Model-Based Design)典型的产品,是国内可对标国际控制与仿真领域本土化的快速控制原型与半实物仿真系统。
RCP功能,系统可通过对MATLAB/Simulink对控制算法进行仿真,将输入、输出接口替换为公司的cSPACE模块,编译并自动生成DSP代码,在cSPACE上运行后就能方便地实现对被控对象的控制。
HIL功能,系统可运行Simulink搭建的被控对象的模型,模拟被控对象,通过输入接口接收控制量的输入,输出接口输出被控对象的状态,测试实际的控制器,实现硬件在回路仿真功能。

开源高精度工匠机器人系统是由四轴机械臂本体、伺服驱动器、控制系统、上位机和稳压电源组成。该产品是目前市场上唯一提供机器人运动控制、交流伺服驱动器都开源的教学、科研产品。机器人控制系统采用国际上先进的基于模型设计(MBD:Model-Based Design)的设计方法,软硬件基于MATLAB/Simulink 和TI TMS320F28335 DSP 芯片架构进行开发。伺服驱动器同样采用基于模型设计的设计方法进行开发,在MATLAB/Simulink中实现交流伺服电机的电流(FOC磁场定向控制)、速度、位置三闭环(PID)的驱动控制算法。该产品运动控制及伺服驱动代码全开源,让高校老师和学生能够验证SCARA机器人多自由度运动控制算法、轨迹规划算法等,并能开发高级的动力学算法,还可以在该产品上开发各种机器人场景应用。

开源六轴协作机械臂系统(型号:ROCR6)是由六轴机械臂本体、控制系统、上位机和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。驱动控制支持两套系统,分别是基于TMS320F28335 DSP和基于AM335x RT-Linux。机械臂系统使用完全自主研发的关节驱动器及运动控制器,为教学和科研提供优越的开放性支撑。

传感器融合室外作业智能机器人,是基于MATLAB/Simulink和ROS联合开发,集成了安装Linux和ROS的控制系统,系统由开源四驱自主导航的移动底盘、多轴机械臂、执行末端(仿生灵巧手或电动夹爪)、开源机器视觉系统和北斗导航定位系统,5G通讯等组成。可支持成为机器人工程、机电一体化、自动化、人工智能等专业平台教学实验载体,也可作为机器人、人工智能等领域的高校、研究所和企业的科研载体。同时,也能应用于课程实训、毕业设计、学术竞赛、创新创客、产品开发等。另外,该产品还支持多传感器融合,支持智能语音控制、智能识别、GPS、5G远程图传、神经网络、深度学习等应用扩展。对用户搭建目标跟随、巡检机器人、生产线上移动抓取和上下料等场景应用研究提供技术服务及支撑。